دانلود پایان نامه آماده
هوش هیجانی,دانلود پایان نامه، دانلود پایان نامه حقوق، پایان نامه آماده، پایان نامه نرم افزار، پایان نامه مدیریت، پایان نامه علوم تربیتی، پایان نامه روانشناسی,دانلود مقالهدانلود پایان نامه آماده
هوش هیجانی,دانلود پایان نامه، دانلود پایان نامه حقوق، پایان نامه آماده، پایان نامه نرم افزار، پایان نامه مدیریت، پایان نامه علوم تربیتی، پایان نامه روانشناسی,دانلود مقاله
شبیه سازی موتور جریان مستقیم
پروژه مدلسازی و شبیه سازی موتور جریان مستقیم بدون جاروبک 9 فاز BLDC
 موتورهای BLDC یک نوع خاص از موتورهای سنکرون می باشند. این مطلب به آن معناست که میدان مغناطیسی ایجاد شده توسط استاتور و میدان مغناطیسی ایجاد شده توسط روتور با فرکانسی واحد دوران می کنند.موتورهای BLDC فاقد پارامتری به نام لغزش، مشابه آنچه در موتورهای القایی مشاهده می شود هستند. موتورهای BLDC در ...
موتورهای BLDC یک نوع خاص از موتورهای سنکرون می باشند. این مطلب به آن معناست که میدان مغناطیسی ایجاد شده توسط استاتور و میدان مغناطیسی ایجاد شده توسط روتور با فرکانسی واحد دوران می کنند.موتورهای BLDC فاقد پارامتری به نام لغزش، مشابه آنچه در موتورهای القایی مشاهده می شود هستند. موتورهای BLDC در ...
در نوع تغذیه سینوسی که در واقع ماشین سنکرون مغناطیس دائم [1](PMSM) میباشد برای ایجاد شار سینوسی علاوه بر اینکه توزیع سیم پیچی فازهای استاتور سینوسی است، ولتاژ اعمالی به فازهای استاتور نیز سینوسی میباشد. لذا دانستن مقدار لحظهای موقعیت روتور الزامی بوده و در نتیجه باید از Encoder های موقعیت دقیق استفاده نمود. مقدار گشتاور لحظهای در این نوع موتور بسیار صاف بوده و ریپل گشتاور ناچیز میباشد.با این وجود ایجاد سیمبندی سینوسی با پیچیدگی بیشتری همراه بوده و تعداد اتصالات داخلی بیشتری را میطلبد.در مجموع ساخت استاتور با اتصالات سینوسی هزینه بیشتری را تحمیل مینماید. این موتور به نام موتور BLACنیز شناخته میشود [2].شکل 1-2، شکل موج ولتاژ ضد محرکه یک موتور BLAC را نمایش میدهد.
[1]- Permanent MagnetSychronous Motor
فهرست مطالب:
1-1- مقدمه
1-2- تعریف موتور PMBLDC
1-3- تاریخچه و روند گسترش ماشین های PMBLDC
1-4- ساختمان موتور BLDC
1-4-1- استاتور
1-4-1-1- موتورهای BLDC با تغذیه ولتاژ سینوسی (BLAC)
1-4-1-2- موتور BLDC با تغذیه ولتاژ ورودی ذوزنقه ای
1-4-1-3- مقایسه موتور های بدون جاروبک با جریان آرمیچر سینوسی (BLAC) و مربعی (BLDC)
1-4-2- روتور
1-4-3- سنسورهای هال
1-4-4- مواد مغناطیس دائم
1-5- اصول عملکرد موتور BLDC
1-5-1- تبیین مفهوم کموتاسیون در یک موتور کموتاتور dc
1-5-2- کموتاسیون در موتور BLDC
1-6- مقایسه موتور BLDC با موتور DC و القائی
1-7- مزایا و معایب موتورهای PMBLDC
1-8- انواع توپولوژی های ماشین های BLDC
1-8-1- تکنیک های اتصال آهنربا های دائم به روتور
1-8-2- ساختارهای مختلف استاتور
1-9- شبیه سازی موتور بدون جاروبک 9 فاز
1-10 نتیجه گیری
1-11- مراجع
فهرست اشکال
شکل 1- 1: استاتور یک موتور BLDC
شکل 1- 2: شکل موج ولتاژ Back-EMF یک موتور BLDC سینوسی
شکل 1- 3: شکل موج ولتاژ Back-EMF یک موتور BLDC ذوزنقه ای
شکل 1- 4: الف) موتور نوع BLAC با آرایش سیم پیچی توزیع شده ب) موتور نوع BLDC با آرایش سیم پیچی متمرکز
شکل 1- 5: شکل موج جریان آرمیچر ماشین های بدون جاروبک الف) ماشین موج مربعی ب) ماشین موج سینوسی
شکل 1- 6: پیکربندی های مختلف روتور در یک موتور مغناطیس دائم
شکل 1- 7: برش عرضی یک موتور BLDC
شکل 1- 8: حلقه B-H ماده مغناطیس دائم
شکل 1- 9: نمونه ای از مشخصات دمایی مواد مغناطیس دائم
شکل 1- 10: مقطع ارضی از یک موتور کموتاسیون DC
شکل 1- 11: منحنی های شار نشتی، نیروی ضد محرکه، گشتاور و جریان در یک موتور کموتاتور DC
شکل 1- 12: موتور DC اولیه با سه جزء کموتاتور و دو جاروبک
شکل 1- 13: مدار اینورتر PWM جهت استفاده در موتورهای BLDC
شکل 1- 14: تغییرات سیگنال های اثر هال، ولتاژ ضد محرکه، گشتاور خروجی و جریان فازها در یک موتور BLDC
شکل 1- 15: ترتیب تحریک سیم پیچ ها با توجه به سنسورهای هال یک موتور BLDC
شکل 1- 16: نمای دو بعدی از موتور BLDC و اجزای آن الف) نوع روتور بیرونی ب) نوع روتور درونی
شکل 1- 17: آهنرباهای مغناطیس دائم روی سطح روتور آهنی
شکل 1- 18: آهنرباهای مغناطیس دائم نصب شده روی سطح بیرونی روتور
شکل 1- 19: سه روش نصب آهنربا روی سطح خارجی روتور
شکل 1- 20: آهنرباهای مغناطیس دائم نصب شده روی سطح درونی روتور
شکل 1- 21: الف) روتور مغناطیس دائم درونی محیطی ب) روتور مغناطیس دائم درونی شعاعی
شکل 1- 22: موتور BLDC با ساختارهای استاتور مختلف
شکل 1- 23: موتور BLDC با ساختار استاتور بدون شیار و سیم پیچی آن
شکل 1- 24: موتور BLDC با ساختار استاتور بدون شیار با سیم پیچی مارپیچی (ترویدال)
شکل 1- 25: موتور BLDC الف) ساختار شار محوری ب) ساختار شار شعاعی
شکل 1- 26: نمونه ای از یک موتور تکفاز BLDC 4 قطب
شکل 1- 27: نمونه ای از یک موتور BLDC خطی
شکل 1- 28: اجزای مختلف موتور BLDC خطی الف) نمای سه بعدی ب) نمای دو بعدی
شکل 1- 29: موتور BLDC دو استوانه ای واجزای آن
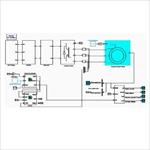
شکل 1- 30: شمای کلی شبیه سازی شده در محیط سیمولینک متلب
شکل 1- 31: بلوک مربوط به تولید نیروی ضد محرکه
شکل 1- 32: بلوک مربوط به تولید و تغییر گشتاور
شکل 1- 33: تغییرات توان الکترومغناطیسی فاصله هوایی تحت شرایط بارزدایی
شکل 1- 34: تغییرات گشتاور الکترومغناطیسی فاصله هوایی تحت شرایط بارزدایی
شکل 1- 35: تغییرات سرعت محور تحت شرایط بارزدایی
شکل 1- 36: تغییرات جریان آرمیچر تحت شرایط نرمال
شکل 1- 37: تغییرات ولتاژ ترمینال تحت شرایط نرمال
شکل 1- 38: تغییرات ولتاژ ضد محرکه تحت شرایط نرمال
فهرست جداول
جدول 1- 1: مقایسه موتور BLDC با موتور DC و القائی
پروژه بررسی و شبیه سازی درایو موتور
پروژه بررسی و شبیه سازی درایو موتور القایی و رفتار آن تحت شرایط کاهش ولتاژ
 پروژه بررسی و شبیه سازی درایو موتور القایی و رفتارآن تحت شرایط کاهش ولتاژ، شامل: فصل اول: مقدمه، فصل دوم: موتورهای الکتریکی، فصل سوم: اصول اولیه موتور القایی سه فاز، فصل چهارم: کنترل کننده های دور موتور، فصل پنجم: کنترل موتور القایی به روش برداری FOC، فصل ششم: شبیه سازی، فصل هفتم: نتیجه گیری
پروژه بررسی و شبیه سازی درایو موتور القایی و رفتارآن تحت شرایط کاهش ولتاژ، شامل: فصل اول: مقدمه، فصل دوم: موتورهای الکتریکی، فصل سوم: اصول اولیه موتور القایی سه فاز، فصل چهارم: کنترل کننده های دور موتور، فصل پنجم: کنترل موتور القایی به روش برداری FOC، فصل ششم: شبیه سازی، فصل هفتم: نتیجه گیری
بخشی از مقدمه:
در اغلب بخشهای صنعتی، انرژی الکتریکی از مهمترین منابع انرژی به شمار میرود. امروزه در صنعت، ماشینهای متفاوت و با سرعت های مختلف مورد استفاده قرار می گیرد که موارد قابل ذکر عبارتند از: ماشین برش فلزات، جرثقیل الکتریکی، ماشینهای مربوط به حمل و نقل و انواع مختلف وسایل چاپ، معدن ذغال سنگ و صنایع دیگر .برای مثال در چرخاننده الکتریکی در ماشین برش فلزات، سرعت سیستم میباید مطابق با نوع کار، فلز و کیفیت نوع برش و اندازه قطعه مورد نظر، قابل تنظیم باشد. از آنجا که موتورهای الکتریکی مصرفکننده اصلی انرژی در کارخانجات صنعتی هستند، لذا بهینهسازی مصرف در این موتورها به عنوان گزینهای اساسی در ارتباط با صرفه جویی انرژی، قابل بررسی میباشد. در کلیه ماشین آلات ذکر شده، چرخاننده باید مجهز به کنترل سرعت باشد تا بتواند کمیت تولید زیاد، شرایط کار مطلوب و کیفیت محصول خوب باشد. توسط کنترل سرعت می توان سرعت چرخاننده را به میزان مورد نیاز جهت انجام مراحل کار تغییر داد. مفهوم کنترل سرعت یا تنظیم نباید شامل تغییر طبیعی در هنگام اخذ بار شود. تغییر سرعت مورد نیاز در روی موتور چرخاننده و یا عنصر مرتبط به موتور چرخاننده انجام میگیرد، که ممکن است این عمل با دست توسط اپراتور و یا به طور اتوماتیک توسط وسایل کنترل انجام گیرد. امروزه تنظیم سرعت توسط مدار الکتریکی توسعه یافته و از نظر اقتصادی و نتایج حاصله بر کنترل مکانیکی ارجعیت دارد.
یکی از راههای فوق العاده مؤثر در کاهش مصرف این تجهیزات، استفاده از درایو یا کنترل کنندههای دور موتور است.
فهرست مطالب:
فصل اول: مقدمه
فصل دوم: موتورهای الکتریکی
فصل سوم: اصول اولیه موتور القایی سه فاز
3-1- ساختمان موتورهای سه فاز
3-1-1- استاتور
3-1-2- روتور
3-1-2-1- روتور قفس سنجابی
3-1-2-2- روتور سیم بندی شده
3-2- تئوری ماشین های سه فاز
3-3- راه اندازی
3-4- کنترل سرعت
فصل چهارم: کنترل کننده های دور موتور
4-1- مزایای استفاده از کنترل کننده های دور موتور
4-2- بخشی از کاربری درایوهای موتور AC و DC
4-3-کلیات
4-4- ساختمان قسمت قدرت درایوهای AC
4-5-کنترل برداری
فصل پنجم: کنترل موتور القایی به روش برداری FOC
5-1- مبانی الگوریتم کنترل برداری به روش FOC با سنسور موقعیت
5-2- بخش قدرت
فصل ششم: شبیه سازی
فصل هفتم: نتیجه گیری و پیشنهادات
منابع و مآخذ